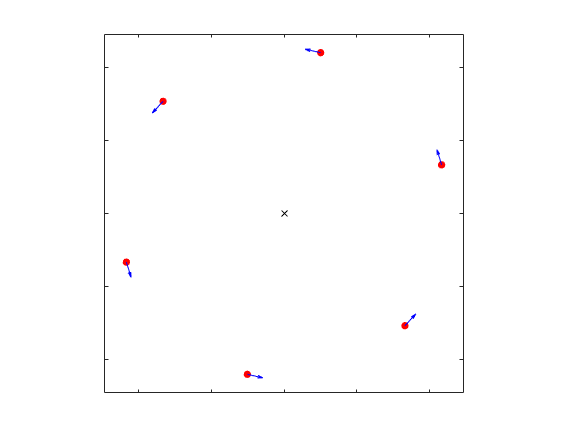
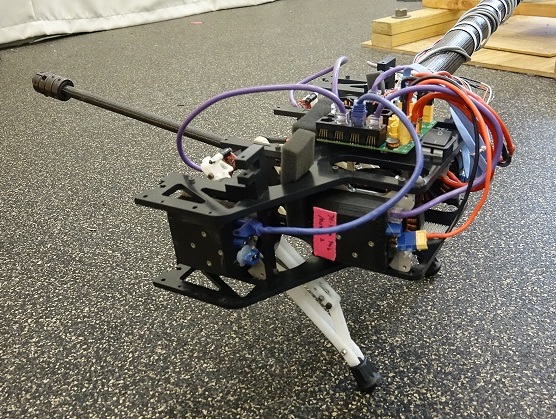
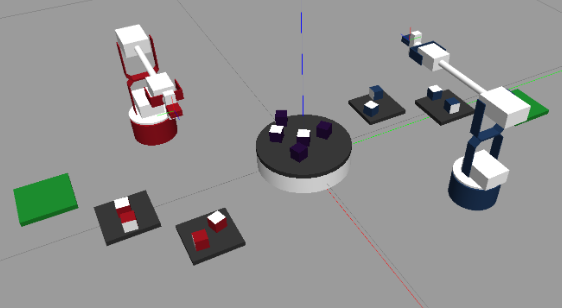
Research Time Delay Induced Bistability in Swarms Work at the U.S. Naval Research Laboratory Hip-Energized Hopping on Jerboa Work with Kod*lab Target Tracking in the Presence of Occlusions Conformal prediction to ensure observational coverage by a quadrotor (section under construction) Quantifying Uncertainty in Swarm Motion Using conformal prediction to quantify the uncertainty of a learned model (section under construction) Academic Projects F1TENTH Autonomous Racing Winning internationally with self-driving RC cars (section under construction) Competitive Pick and Place Racing to pick up blocks with a robot arm faster than the other team (section under construction) Optical Flow to Improve Image Segmentation Predicting trajectories and keeping track of objects in the presence of errors (section under construction)