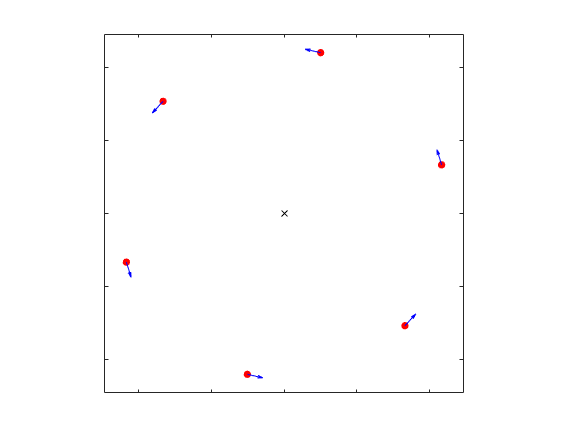
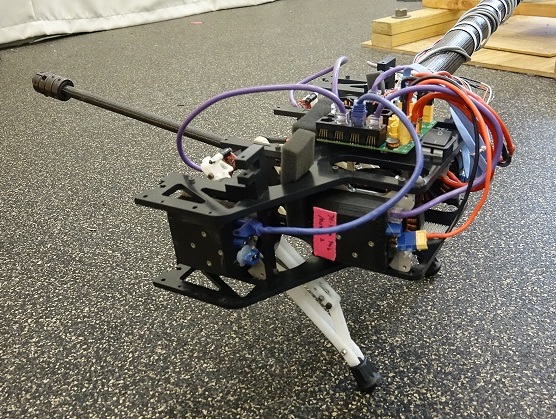
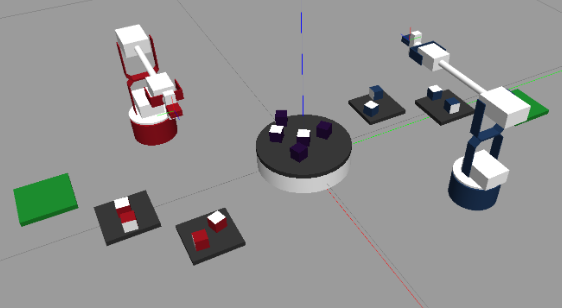
Research Time Delay Induced Bistability in Swarms Work at the U.S. Naval Research Laboratory Hip-Energized Hopping on Jerboa Work with Kod*lab on a hip-energized robotic biped Target Tracking in the Presence of Occlusions Conformal prediction to ensure observational coverage by a quadrotor Course-Related Projects F1TENTH Autonomous Racing First place internationally with self-driving RC cars Competitive Robot Arm Pick and Place Block stacking against an opponent using a simulated Lynx 5 robotic arm Optical Flow to Improve Image Segmentation Combining YOLO with optical flow for more robust object indexing